Magnetorheological Fluids (MRF) – References
Recently a multiphysics research aimed at reducing the absorption of vacuum pumps in Diesel engines was carried out in co-operation between Pierburg Pump Technology (Livorno, Italy) and the University of Pisa (DICI and DESTEC departments). Aim of the research, which was funded by Regione Toscana in the framework of the “Bando Unico 2008”, was the design of a new vacuum pump, actuated by a magnetorheological clutch.

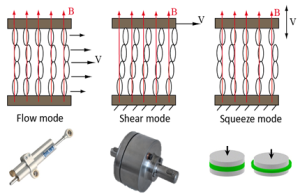
Magnetorheological fluids (MRF) are smart materials. Their basic property is the capability of changing their rheological properties in a very short time under the effect of a magnetic field. When not subjected to a magnetic field they behave as Newtonian fluids. In contrast, in the presence of a magnetic field, they exhibit a rigid behaviour up to a threshold, beyond which they appear almost-perfectly plastic.
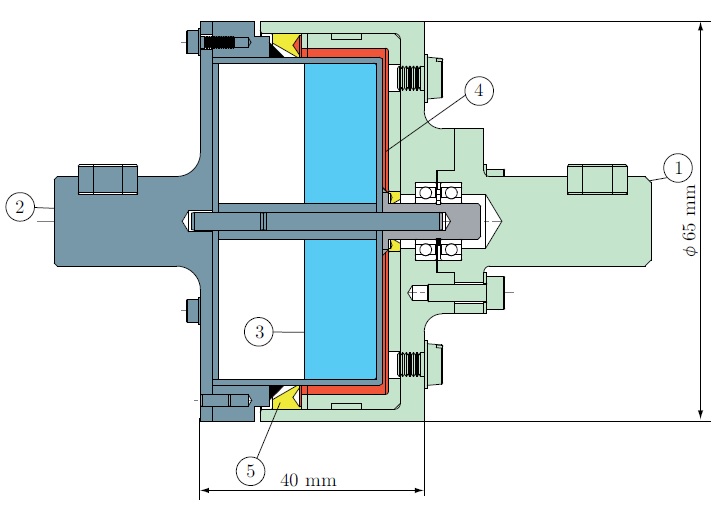
The aim of the developed MRF clutches was to disengage engine auxiliaries when not necessary. Several concepts of the clutch were designed, manufactured and tested. All the clutch prototypes are composed of the primary (no. 1) and secondary (no. 2) shafts. The gap between the two shafts is filled with the MR fluid (no. 4) which is confined by the sealings (no. 5). The permanent magnet is composed of four circular sectors with diametral magnetization, and can be moved axially by a pneumatic actuation system passively driven by the pressure value in the power-brake boost conncted to the vacuum pump. When the magnet is placed on the right, the MR fluid is magnetized and the clutch results engaged (ON condition). If the magnet is moved to the other side, the magnetic field is shielded by the ferromagnetic ring of the secondary group and the clutch results disengaged (OFF condition).
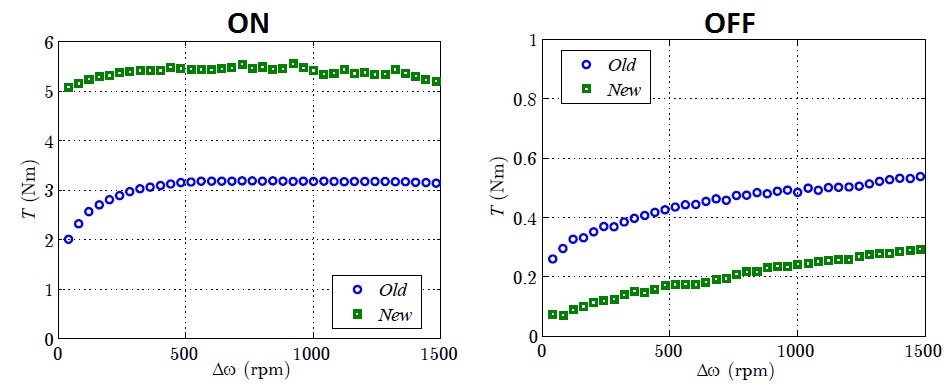
The torque transmitted by the developed clutches in the two operating conditions was measured at an experimental benche. The gain between the ON and OFF transmitted torque, for the last developed prototype was about 10.
Shape Memory Alloys (SMA) – References
A brief activity on SMA was carried out in co-operation with the Dynamic and Smart Systems Laboratory of the University of Toledo, OH (USA), directed by prof. M. Elahinia.
The activity foresaw the design and test of a simple device, based on SMA, which could be coupled with the already developed MR clutch.
Shape memory alloys present unique properties in terms of their stress-strain characteristic, allowing large deformations and shape recovery. SMAs present two different phases, austenite (parent) and martensite, and the transformation occurs near the room temperature.
In this study we dealt with Shape Memory Effect (SME): starting from twinned martensite, by increasing the deviatoric stress, it is possible to get permanent, even non-plastic, deformation (maximum recoverable deformation about 5%), which can be recovered by heating the part until the alloy temperature is above the austenite finish temperature. Once the transformation is completed, the initial shape is recovered (shape memory effect, SME) and, by cooling, the direct transformation from austenite to martensite occurs.
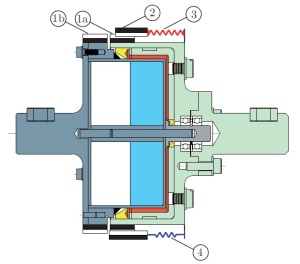
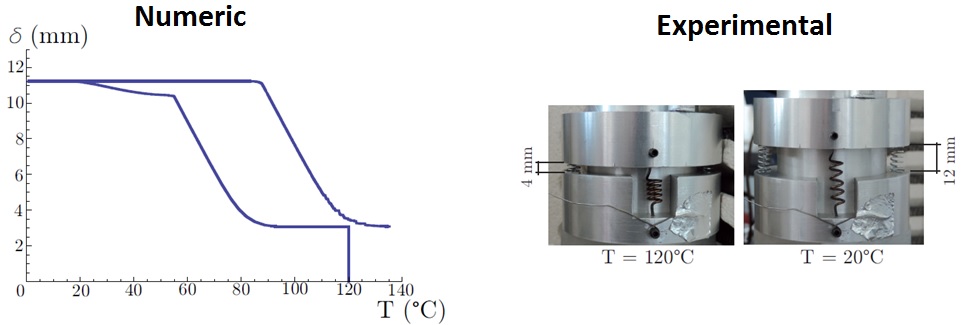
In order to succeed in transmitting a higher torque in particular operating conditions, a sliding spline sleeve (Fig. 7) was conceived to be assembled concentrically with the MR clutch. The spline sleeve is composed of two non-sliding parts (no. 1a and no. 1b), which are fixed to the primary and secondary shaft respectively, and a spline sleeve sliding element (no. 2). The element no. 2 is connected to a series of traditional compression (no. 3) and SMA tension (no. 4) springs. When the temperature is below 20°C the SMA springs are in detwinned martensite phase and the sliding sleeve is engaged. If the tempeature rises over 80°C (normal operating conidition) the transformation from martensite to austenite occur, the SMA-spring contract and the sliding sleeve is disengaged.
Numerical simulations were carried out to model the system behavior and a dummy device was built and tested.